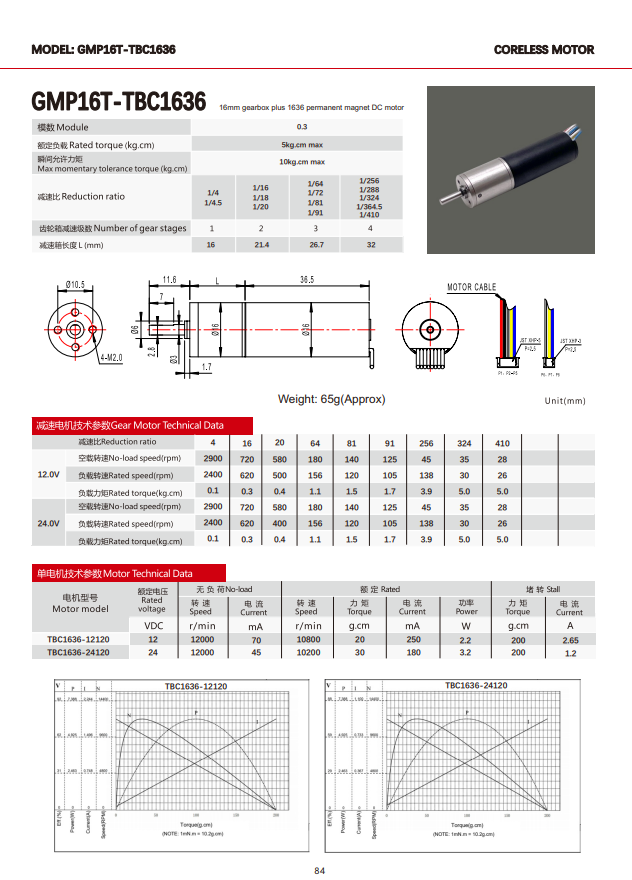
GMP16T-TBC1636 300mNm 12V 24V 16mm Coreless Motor Brushless DC Motor for Medical Devices Faulhaber Maxon Motor Replacement





1. Kugwiritsa ntchito bwino kwambiri komanso kusunga mphamvu, kuchuluka kwa mphamvu zomwe zimagwiritsidwa ntchito posintha mphamvu kumaposa 90%
Kapangidwe ka chikho chopanda coreless hollow kamagwiritsidwa ntchito kuti athetseretu kutayika kwa eddy current ndi hysteresis, ndipo mphamvu yosinthira mphamvu imatha kufika pa 90%, zomwe zimachepetsa kwambiri kugwiritsa ntchito mphamvu ndipo ndizoyenera zida zachipatala zomwe zimafunika kugwira ntchito kwa nthawi yayitali.
Ukadaulo wopanda burashi umachepetsanso kukangana ndi kutayika kwa burashi, umathandizira kugwiritsa ntchito mphamvu bwino, umathandizira kulowetsa kwa magetsi a 12V/24V, umasinthasintha mabatire a lithiamu kapena magetsi okhazikika, komanso umayankha mosavuta pazochitika zosiyanasiyana zogwiritsa ntchito mphamvu.
2. Kuyankha kwakukulu kwamphamvu komanso kuwongolera kolondola
Kulephera kwa rotor ndi kochepa kwambiri (kulephera kwa rotor ndi 1/3 yokha ya ma motors achikhalidwe), nthawi yokhazikika ya makina ndi yotsika mpaka ma millisecond 10, imathandizira kusintha koyambira ndi kuyimitsa ndi kukweza nthawi yomweyo, ndipo imakwaniritsa zofunikira zoyendetsera bwino zida zamankhwala (monga maloboti opangira opaleshoni, mapampu a micro-injection)
Pophatikizidwa ndi ukadaulo wamagetsi, imathandizira kulamulira liwiro la PWM ndi kuwongolera kotsekedwa, ili ndi magwiridwe antchito abwino kwambiri olamulira liwiro, ndipo kusinthasintha kwa torque ndi kochepera 2%, komwe ndikoyenera kulamulira kayendedwe kabwino kwambiri kapena kuwongolera malo.
3. Phokoso lotsika kwambiri komanso kugwedezeka
Palibe brashi ndi commutator friction, kusokoneza kwa electromagnetic kochepa kwambiri (EMI), komanso phokoso logwira ntchito <40dB, lomwe ndi loyenera malo azachipatala (monga ma monitor, makina opumira mpweya) komanso zochitika zapakhomo (monga ma massager, ma burashi amagetsi) okhala ndi zofunikira kwambiri kuti munthu akhale chete.
4. Kapangidwe kakang'ono komanso kopepuka
16mm m'mimba mwake kakang'ono kwambiri, kulemera kopepuka, mphamvu zambiri, kumasunga malo a zida, makamaka zoyenera zida zachipatala zonyamulika (monga ma ultrasound probes ogwiritsidwa ntchito m'manja) kapena ma module a micro robot drive
5. Moyo wautali komanso kudalirika kwambiri
Kapangidwe kake kopanda burashi kamapewa kusowa kwa burashi, ndipo ndi ma bearing ndi ma gearbox achitsulo osatha, nthawi yogwira ntchito imatha kufika maola masauzande ambiri, kukwaniritsa zofunikira za zida zachipatala. Mitundu ina imathandizira mulingo woteteza wa IP44, wosathira fumbi komanso wosalowa madzi, woyenera malo okhala ndi chinyezi kapena fumbi.
1. Mphamvu yotulutsa mphamvu zambiri komanso liwiro lalikulu
Mphamvu yoyezedwa ndi 300mNm, mphamvu yofika pachimake imatha kufika 450mNm, ndi bokosi lamagetsi (chiŵerengero chochepetsera chingasinthidwe), mphamvu yotulutsa mphamvu yotsika (monga kukanikiza molondola zida zopangira opaleshoni) kapena ntchito yokhazikika yothamanga kwambiri (monga centrifuge)
Liwiro lamagetsi ndi 1:1000, lothandizira kusintha kwa zinthu zambiri kuchokera ku torque yothamanga pang'ono kupita ku torque yothamanga kwambiri, kusintha malinga ndi zofunikira zovuta zowongolera.
2. Ubwino wa ukadaulo wopanda burashi
Ukadaulo wamagetsi umachotsa zipsera ndi kusokoneza kwa ma elekitiromagineti, umadutsa satifiketi ya EMC yachipatala, ndipo umaonetsetsa kuti ukugwirizana ndi zida zamagetsi zodziwika bwino (monga zida za MRI)
Injini yopanda maburashi imathandizira maginito encoder kapena Hall sensor feedback kuti ikwaniritse kuwongolera kotsekedwa, kulondola kwa malo a ± 0.01°, koyenera zida zodziyimira zokha (monga endoscope steering system)
3. Kutaya kutentha ndi kukonza bwino kutentha
Kuyenda kwa mpweya mkati ndi kunja kwa kapu yopanda kanthu kumawonjezera kutentha, ndipo ndi chitsulo cha maginito chosagwira kutentha kwambiri komanso chipolopolo choyendetsa kutentha, kukwera kwa kutentha kumachepetsedwa ndi 30% poyerekeza ndi ma mota achikhalidwe, kuonetsetsa kuti ntchito ikuyenda bwino m'malo otentha kwambiri (monga zida zoyeretsera)
1. Malo ogwiritsira ntchito zida zachipatala
Zipangizo zodziwira matenda: mkono wosamutsa chitsanzo cha chowunikira cha biochemical, endoscope rotary joint drive
Zipangizo zochizira: gawo lolondola la jakisoni wa insulin, mutu wa mphamvu ya kubowola mano, cholumikizira chamanja cha robot yochita opaleshoni (roboti imodzi imafuna ma moteri 12-20 okhala ndi zikho zopanda kanthu)
Chipangizo chothandizira moyo: chowongolera mpweya, chopopera mpweya cha micro oximeter
2. Kusamalira nyumba mwanzeru komanso kusamalira munthu payekha
Chisamaliro chaumoyo: gawo la kugwedeza mfuti yopukutira kwambiri, choyendetsera tsamba lamagetsi lometera
Zipangizo zanzeru zapakhomo: loboti yosesa, makatani anzeru
3. Makina odzichitira okha a mafakitale ndi maloboti
Makina olondola: AGV guide wheel drive, micro robot joints (monga robot humanoid finger actuators)
Zipangizo zodziwira: kusintha kwa mawonekedwe a scanner, kuwongolera makina opangira mzere wokha
4. Minda yomwe ikukula
Zamagetsi zamagetsi: drone servo, gimbal stabilizer zoom control
Magalimoto atsopano amphamvu: kusintha kwa damper ya mpweya woziziritsa galimoto, kuyendetsa kwa fan yozizira kwa batri