TBC1652 12V 24V 16mm Moyo Wautali Wothamanga Kwambiri Micro BLDC Motor Magetsi Opanda Brushless Coreless DC Motor For Robot





1. Kuchita bwino kwambiri komanso kupulumutsa mphamvu, moyo wautali kwambiri
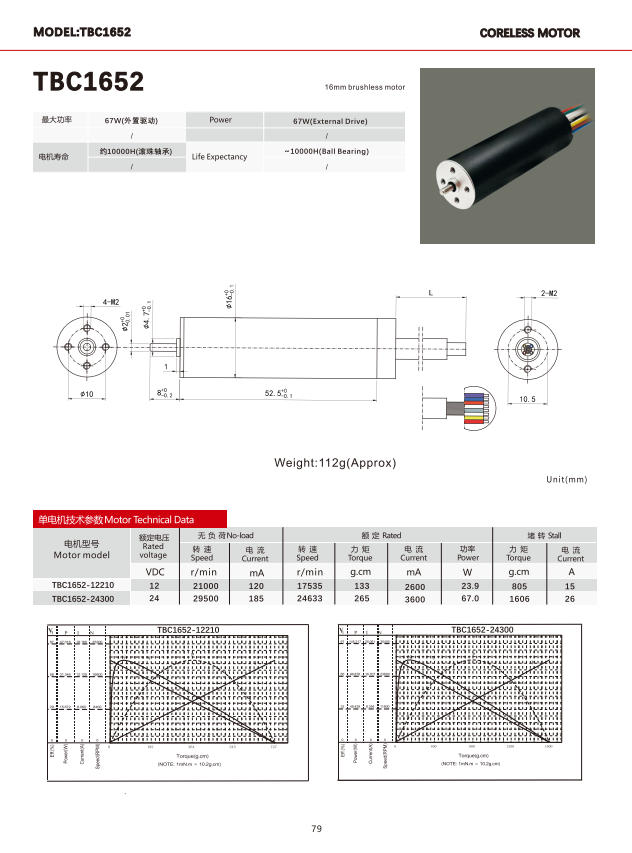
Kapangidwe ka kapu yopanda burashi kamene kamachotsa kwathunthu kutayika kwa brashi ndi kutayika kwa core eddy current, ndi mphamvu yosinthira mphamvu ya >85% komanso kupanga kutentha kochepa kwambiri. Kuphatikiza ndi ma bearing a ceramic osatha, nthawi ya moyo imatha kufika maola opitilira 10,000, zomwe ndizoyenera malo olumikizirana a robot kapena zida zodziyimira zokha zomwe zimafunika kugwira ntchito maola 24 patsiku.
2. Kuchepetsa mphamvu ya thupi komanso kupepuka
M'mimba mwake ndi 16mm yokha, kulemera kwake ndi pafupifupi 110g, komwe ndikoyenera kugwiritsa ntchito zinthu zomwe zili ndi malo ochepa (monga ma micro robot finger joints, endoscope steering modules).
3. Liwiro lalikulu komanso kuwongolera kolondola kwambiri
Liwiro losanyamula katundu limatha kufika pa 10,000-50,000 RPM (kutengera mphamvu yamagetsi ndi kusintha kwa katundu), limathandizira kulamulira liwiro molondola (mphamvu yamagetsi ya PWM/analog), kusinthasintha kwa liwiro <1%, kulondola kwa mphamvu yamagetsi ±2%, ndipo limasintha malinga ndi kukonzekera kwa njira ya robot kapena zofunikira pakuyika zida molondola.
4. Kulephera kwambiri, kuyankha mwachangu
Rotor yopanda core ili ndi inertia yozungulira ya 1/5 yokha ya mota yachikhalidwe yopukutidwa, ndipo nthawi yokhazikika ya makina ndi yochepera 5ms, yomwe imatha kukwaniritsa millisecond-level start-stop ndi reverse motion, kukwaniritsa zosowa za high-speed holding kapena high-frequency vibration.
5. Kutha kukhala chete komanso kupewa kusokoneza
Palibe burashi yoyaka ndi kusokoneza kwa maginito (yovomerezeka ndi CE), phokoso logwira ntchito <35dB, yoyenera malo omwe ali ndi mphamvu zamagetsi kapena zochitika zomwe zimafuna kuyanjana kwa makompyuta ndi anthu.
1. Kugwirizana kwa magetsi ambiri
Imathandizira 12V-24V DC input, imagwirizana ndi mabatire a lithiamu, ma supercapacitor kapena ma voltage regulators, circuit yotetezedwa ndi overvoltage/reverse kuti iwonetsetse kuti zida zili bwino.
2. Mphamvu yayikulu komanso kusintha kwa gearbox
Mphamvu yovotera 50-300mNm (yosinthika), mphamvu yotulutsa imatha kufika 3N·m pambuyo pa bokosi la gear lophatikizidwa la mapulaneti, chiŵerengero chochepetsera chimakhala pakati pa 5:1 ndi 1000:1, kukwaniritsa zofunikira za mphamvu yotsika kapena mphamvu yopepuka yothamanga kwambiri.
3. Kapangidwe kolondola kwa zitsulo zonse
Chipolopolocho chimapangidwa ndi aluminiyamu ya ndege, ndipo magiya amkati amatha kukhala achitsulo chosapanga dzimbiri kapena titaniyamu, omwe sagonjetsedwa ndi dzimbiri ndipo amatha kutentha kwambiri. Kutentha kwa ntchito ndi -20℃ mpaka +85℃, komwe kumatha kusintha malinga ndi malo ovuta.
4. Kugwirizana kwanzeru kwa ulamuliro
Imathandizira sensa ya Hall, encoder ya maginito kapena ndemanga ya grating, yogwirizana ndi ma protocol olumikizirana a CANopen ndi RS485, imatha kulumikizidwa mosavuta ku ROS kapena PLC control system, ndikukwaniritsa malo otsekedwa/kulamulira liwiro.
5. Kapangidwe ka modular
Pali mitundu ya shaft yopanda kanthu kapena double-shaft yomwe ikupezeka kuti ithandize kuphatikiza ma photoelectric encoders kapena cable routing, zomwe zimathandiza kusunga malo mkati mwa chipangizocho.
1. Maloboti
Maloboti a mafakitale: Malo olumikizirana manja a loboti la SCARA, mzere wolumikizira loboti la Delta, servo yoyendetsera ya AGV.
Maloboti ogwirira ntchito: malo olumikizira zala za loboti yofanana ndi munthu, gawo lowongolera mutu wa loboti.
Maloboti ang'onoang'ono: kuyendetsa tizilombo toyambitsa matenda, thiroster ya robot yowunikira mapaipi.
2. Zida zachipatala komanso zolondola
Zipangizo zopangira opaleshoni: chotsegulira ndi kutseka ma forceps opareshoni chomwe sichimasokoneza kwambiri, kusintha kwa chida chothandizira kuyang'ana maso.
Zipangizo za mu labotale: PCR chitsanzo cha mbale yozungulira, microscope autofocus module.
3. Zipangizo zamagetsi ndi zida zamakono
Ma UAV: gimbal stabilization motor, mapiko opindika a servo.
Zipangizo zovalidwa: mota yolumikizirana ndi mawotchi anzeru, mota yosinthira magalasi a AR.
4. Zoyendetsa zokha zamagalimoto ndi mafakitale
Kuwongolera molondola kwa magalimoto: kusintha kwa ngodya ya HUD yoyikiridwa ndi galimoto, kuyendetsa kwamagetsi kwa throttle micro drive.
Kuyang'anira mafakitale: mkono wa loboti wogwiritsira ntchito semiconductor wafer, kuwongolera bwino kutulutsa kwa guluu wa makina.